📊 Comparative Analysis
Introduction
The development of low-cost and accessible robotic platforms remains a critical challenge for teams entering competitive and research-oriented environments such as RoboCup@Industrial, particularly in regions with limited funding such as Latin America. High costs associated with commercial mobile bases often create a significant barrier to entry, restricting participation and slowing down innovation.
In this context, we present the MICKY mobile base, an omnidirectional robotic platform specifically designed to reduce this barrier by prioritizing cost-efficiency without compromising mechanical capability. The platform adopts a modular architecture based on industrial 40x40 mm aluminum profiles and a Mecanum wheel drive system, enabling holonomic motion and supporting substantial payloads.
Rather than relying on expensive proprietary solutions, MICKY is built using Commercial Off-The-Shelf (COTS) components and a simplified mechanical design. This approach allows the platform to achieve a high payload-to-cost ratio while remaining accessible, maintainable, and adaptable to different use cases.
The system is designed to support mobile manipulation, autonomous navigation, and general-purpose robotics research, while allowing straightforward integration of sensors, actuators, and additional subsystems. Its modularity ensures that the platform can evolve according to the needs of each team.
This work also presents a comparative analysis between MICKY and other omnidirectional mobile bases, emphasizing its efficiency in terms of cost versus payload. The results highlight its position as a competitive and accessible alternative for teams seeking high mechanical performance under budget constraints.
Ultimately, the goal of this project is to democratize access to mobile robotics by providing a scalable, reproducible, and economically viable platform for new teams and researchers.
1. Technical Characterization of the MICKY Base
The MICKY base features a structure built from industrial 40×40 mm aluminum profiles combined with a Mecanum wheel drive system. Although the hardware includes six motors, the control architecture utilizes four active motors for locomotion.
Total Cost (BOM): ~$1647.12 USD
Operational Payload: 32.55 kg
Actuators (Active): 4× NEMA 23 stepper motors with 30 kgf·cm torque each
Wheels: Mecanum MEC-100 set (100 mm diameter), with a nominal capacity of 15 kg per wheel
Structure: Modular chassis using 40×40 mm aluminum profiles (Slot 8)
Experimental payload validation: MICKY transporting a 20 L load (~20 kg), demonstrating stable locomotion under real-world conditions.
With a traction force of 24 kgf for a payload of 32.55 kg (plus a base mass of ~25 kg), the platform operates with a traction-to-total weight ratio of approximately 0.41, ensuring stability during lateral maneuvers without step loss under moderate accelerations.
2. Comparative Table: Omnidirectional Bases
Below is a compilation of technical data for the requested platforms, including low-cost models and industrial reference systems.
Model (Label) |
Payload (kg) |
Cost (USD) |
Drive Type |
Efficiency ($/kg) |
|---|---|---|---|---|
MICKY |
32.55 |
~$1647.12 |
Mecanum (4-wheel drive) |
$50.60 |
Wheeltec R550 |
15.00 |
~$532 |
Mecanum (4-wheel drive) |
$35.46 |
myAGV 2023 Pi |
5.00 |
~$949 |
Mecanum (planetary) |
$189.80 |
Mecabot Pro |
22.00 |
~$6,918 |
Mecanum (with suspension) |
$314.45 |
SuperDroid IG52 |
90.00 |
~$3,750 |
Mecanum (chain-driven) |
$41.66 |
AGV Pro |
50.00 |
~$6,000* |
Mecanum/Omni |
$120.00 |
TIAGo OMNI Base |
100.00 |
~$15,000* |
Mecanum (industrial) |
$150.00 |
TidyBot++ |
90.00 |
~$10,000* |
Powered casters |
$111.11 |
3. Cost vs. Payload Analysis
The scatter plot (represented by the axes below) allows identification of design efficiency. Platforms located in the lower-right quadrant represent the highest payload delivery per dollar invested.
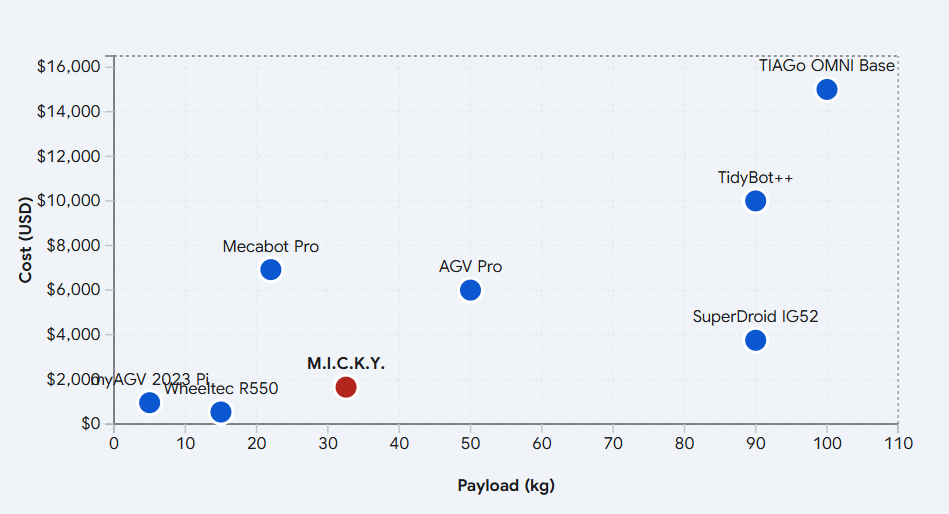
3.1 MICKY Positioning Discussion
The analysis reveals that MICKY occupies an Efficiency Anomaly niche.
MICKY vs. myAGV 2023 Pi:
While the cost is higher (~$1647 vs $949), MICKY delivers 6.5× more payload (32.55 kg vs 5 kg). This highlights a significantly better cost-to-performance ratio in practical applications.MICKY vs. Mecabot Pro:
Mecabot Pro costs over four times more, yet its payload is 32% lower (22 kg). MICKY demonstrates that higher mechanical traction capacity can be achieved using industrial COTS components at a fraction of the cost.
3.2 The Industrial Challenge: TIAGo OMNI Base and SuperDroid
These platforms represent the upper limits of payload capacity.
TIAGo OMNI Base:
It is a benchmark in service robotics design. With 207 mm wheels and industrial-grade motors, it supports a 100 kg payload. MICKY achieves ~32% of this payload at ~11% of the cost, making it a viable alternative for budget-constrained laboratories.SuperDroid IG52:
Achieves payloads of 90 kg through a chain reduction system (10:15). While effective for heavy loads, the chain system requires lubrication and tension adjustment, whereas MICKY’s direct coupling reduces mechanicalmaintenance.